Raspberry : branchement gyroscope
L'idée est de connecter et utiliser un gyroscope via mon vieux Raspberry 2. Pas d'application visée, juste de l'apprentissage.
Totalement noob, j'ai acheté un peu de matériel de base pour pouvoir prétendre à cet exploit. Dans ce kit je vais juste utiliser le breadboard et les fils.
Composant MPU 9250/6500
Spécification du composant : format PDF
Adresses registres et description : format PDF

Connecter le gyroscope

Le composant MPU 9250/6500 est un gyroscope utilisant le bus i2c, il faut donc installer ce qu'il faut :
sudo apt-get install python-smbus i2c-tools
Ensuite il faut démarrer l'interface i2c via sudo raspi-config menu interfaces
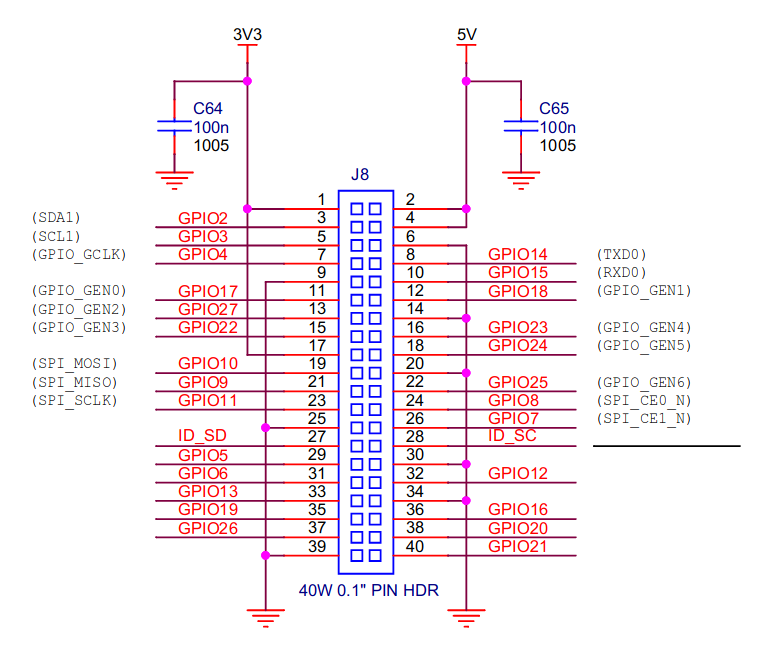
Niveau câblage, 4 branchements Raspberry / MPU :
| Raspberry | Pin | MPU |
|---|---|---|
| 3.3V | 1 | VCC |
| Ground | 14 | GND |
| GPIO 9 (SCL1 i2c) | 5 | SCL |
| GPIO 8 (SDA1 i2c) | 3 | SDA |
Spécification pour mon Raspberry 2 B ( source site Raspberry )
Démarré SSH et NVC sur le Raspberry via sudo raspi-config menu interfaces.
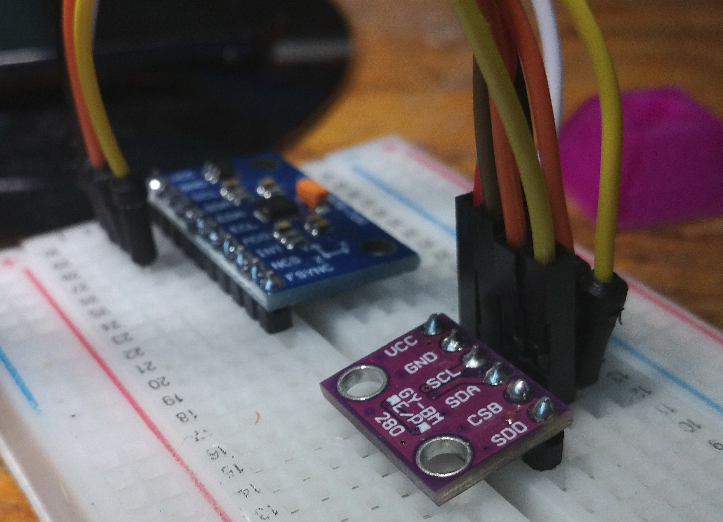
Connexions faites, on allume, rien n'explose. 👍
Désolé pour la poussière, il est vieux Mr Raspberry...
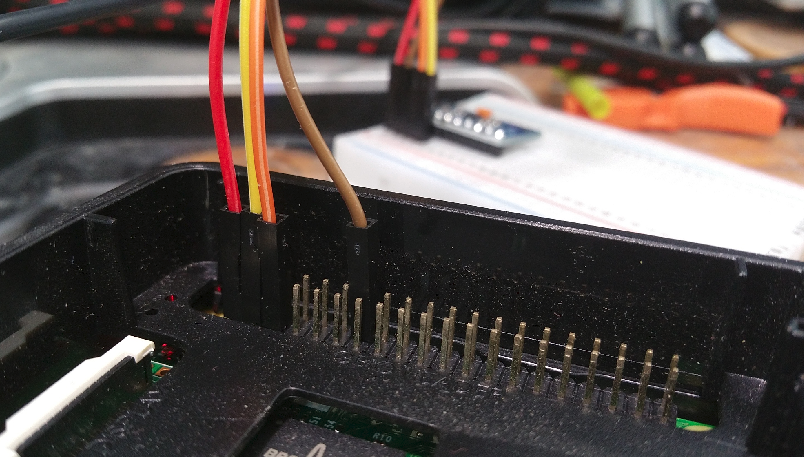

Admirons ces magnifiques soudures, merci Rémy !
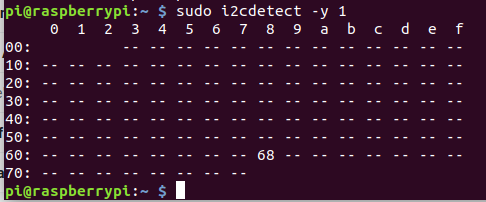
Accès ssh depuis mon PC ok, on essaye?...
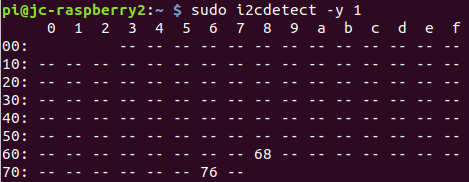
sudo i2cdetect -y 1
Youpi, il semble que le gyroscope est détecté. 68!... 😄
Il s'agit désormais de récupérer les données.
Lire les données
Le composant a l'adresse 0x68 sur le bus i2c, ensuite chaque data a son adresse. Les données intéressantes sont aux adresses suivantes :
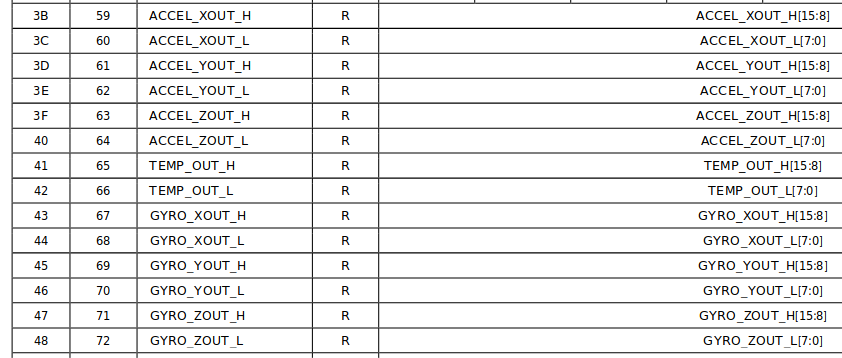
Commande i2cget pour lire ces données. Mettons qu'on souhaite lire 2 octets à l'adresse 0x43 ( GYRO_X_OUT) : ic2get -y 1 0x68 0x43 w
-y pour ne pas avoir a confirmer suite aux différents warnings
1 : numéro du bus
0x68 adresse du composant
0x43 adresse de lecture
w pour word = 2 bytes = 2 octets = 16 bits
Automatiser
Un moyen simple de lire ces données : python. J'ai adapté un script pour un MPU-6000 pour lire les données. Je lis GYRO_XOUT, GYRO_YOUT et GYRO_ZOUT, ainsi que la température.
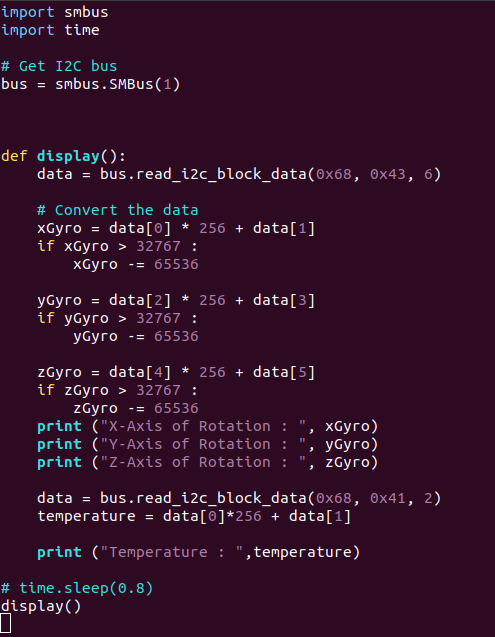
Sortie :

Tout cela est satisfaisant d'un point de vue de noob, tout semble fonctionner. Au niveau des résultats il reste des choses à creuser :
- les données gyroscopiques ne me semblent pas bonnes : valeurs très basses quand je ne bouge pas le composant, quelle que soit sa position, et valeurs très élevées quand je suis en train de bouger le composant. Cela ressemble plus à des données de l'accéléromètre que du gyroscope. J'ai pourtant vérifié plusieurs fois la spec...
- il faut calibrer le gyroscope
Trouvé une librairie Python pour le MP9250 : FaBo9Axis
Installée via :
pip install FaBo9Axis_MPU9250
Pour vérifier les librairies installée on peut utiliser :
pip list
Finalement impossible de m'en sortir avec les librairies, je décide de reprendre le code de la librairie + le code applicatif dans un seul et même fichier. Moche mais ça marche.
Ajout d'un composant sur le bus I2C

Bernard m'a prêté un autre composant : le BME280 (temp, pression, altimètre). J'ai eu du mal à voir les 2 connectés. Ce n'est pas faute d'avoir vérifié les branchements, assez sûr de mon coup, mais rien.
Au final le Raspberry ne fonctionnait plus. Plus de réseau, plus de démarrage. Je démonte tout. Je rebranche le MPU seul, ça marche. Je branche l'autre seul, ça marche. Je rebranche le tout en série... ça marche. Va comprendre Charles.
J'ai donc le MPU9250 en 0x68 et le BME280 en 0x76
Mauvaise nouvelle, en fouillant les internets je tombe sur un commentaire qui suggère que nous ne sommes pas en possession d'un chip BME280 mais d'un BMP260. Id lu à 0xD0 = 0x56 et non 0x60. Pas vérifié pour l'instant mais on le garde à l'esprit.
J'essaye de déchiffrer cette lib c++ pour Arduino.
Lecture de 3 bytes en BME280_TEMPERATURE_MSB_REG
#define BME280_TEMPERATURE_MSB_REG 0xFA //Temperature MSB#define BME280_TEMPERATURE_LSB_REG 0xFB //Temperature LSB#define BME280_TEMPERATURE_XLSB_REG 0xFC //Temperature XLSB
xxxxxxxxxx#define BME280_DIG_T1_LSB_REG 0x88#define BME280_DIG_T1_MSB_REG 0x89#define BME280_DIG_T2_LSB_REG 0x8A#define BME280_DIG_T2_MSB_REG 0x8B#define BME280_DIG_T3_LSB_REG 0x8C#define BME280_DIG_T3_MSB_REG 0x8D
Les données seraient donc là.

Le problème c'est que rien ne bouge. Toujours les mêmes data. Je pense à la lecture de la doc qu'il faut changer le mode. Le composant dort sûrement (mode SLEEP), vais essayer d'utiliser le mode FORCE : on force une mise à jour des registres, puis on les lit. Il y un 3eme mode NORMAL qui met à jour en permanence mais ça consomme plus et nous on est trop du genre à sauver la planète à la moindre occaze.
En repartant sur le script du MPU, je démarre doucement : test avec lecture de l'ID du composant, on devrait récupérer 0x58 (88 en décimal)
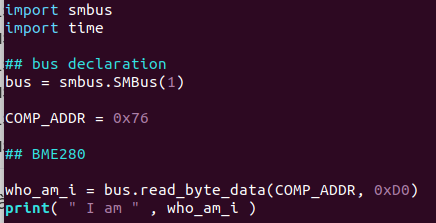
> I am 88
Ça marche. Oui bon, on va pas tirer un 🎆
Vim c'est sympa, et puis ça fait pro, mais comme je ne suis pas un pro je perds beaucoup de temps. Faut que je puisse utiliser mes outils, je vais monter un disque sur mon PC pointant sur le répertoire de mes scripts sur le Raspberry ( ~/Documents/cod = /home/pi/Documents/cod). On installe sshfs et on monte le disque :
sudo apt install sshfs
sshfs [email protected]:/home/pi/Documents/cod ~/Documents/myRasp
Et voilà !
On y accède désormais comme un répertoire local.
Je peux dès lors utiliser mes outils locaux, notamment mon éditeur de code.
Ouf.
Note : j'ai eu besoin de transférer un script, j'apprends la commande scp, quelle merveille Linux :) (source)
xxxxxxxxxxscp /path/to/file username@a:/path/to/destination
Je coupe court après quelques investigations supplémentaires car je n'ai plus le composant en ma possession.
J'ai pu avancer un peu dans la lecture et l'écriture de registres afin de faire un reset ou changer le mode du composant, mais pas pu aller jusqu'à une exploitation des résultats. Mes quelques lignes de python :
import smbusimport time## bus declarationbus = smbus.SMBus(1)# spec : https://embeddedadventures.com/datasheets/BME280.pdfCOMP_ADDR = 0x76DATA_RESET_BYTE = 0xB6 # to be written at REG_RESET_ADDR to resetREG_WHOAMI_ADDR = 0xD0REG_RESET_ADDR = 0xE0REG_MEAS_ADDR = 0xF4 # includes mode bits## BME280 who_am_i = bus.read_byte_data(COMP_ADDR, REG_WHOAMI_ADDR)print( "I am " , who_am_i )# reset component bus.write_byte_data(COMP_ADDR, REG_RESET_ADDR, DATA_RESET_BYTE)print("Reset done.")#get mode data = bus.read_i2c_block_data(COMP_ADDR, REG_MEAS_ADDR)print ("Mode : " , data[0])# set mode, 2 lowest bits (00 = sleep, 10 or 01 = forced, 11 = normal)mode = (data[0] & 0xFC) | 0x02 # old mode , clearing 2 mode beats, adding new mode bitsbus.write_byte_data(COMP_ADDR,REG_MEAS_ADDR, mode)print ("mode set to ", mode)#get mode to checkdata = bus.read_i2c_block_data(COMP_ADDR, REG_MEAS_ADDR)print( "Mode read after modification: " , data[0] )
Bilan
Bilan mitigé.
C'est toujours satisfaisant d'apprendre des choses et d'avoir des petites victoires. Je pratique Linux, au final le gyroscope semble fonctionner, mais pas de résultats probants pour l'heure côté BME.
C'était sympa de faire un peu de bidouille mais si j'y reviens j'essaierai probablement d'utiliser des bibliothèques ou logiciels qui s'occupent du "bas niveau", ce qui, je le précise pour nos amis électroniciens, n'est évidemment pas un jugement de valeur 😉
Notes
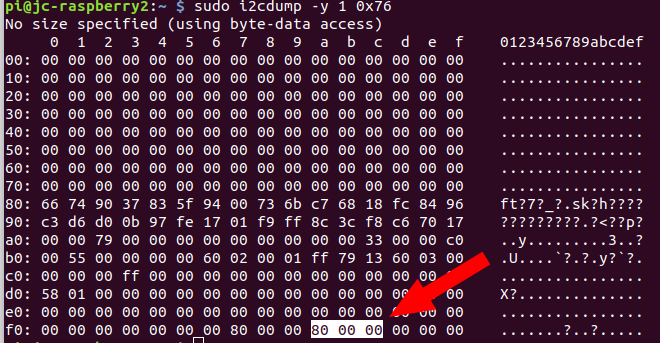
Commande pour lecture globale des registres :
sudo i2cdump -y 1 ADRESSE_COMPOSANT
i2ctools man pages https://manpages.debian.org/testing/i2c-tools/index.html